
Bosch – Real World Automotive Software Benchmarks
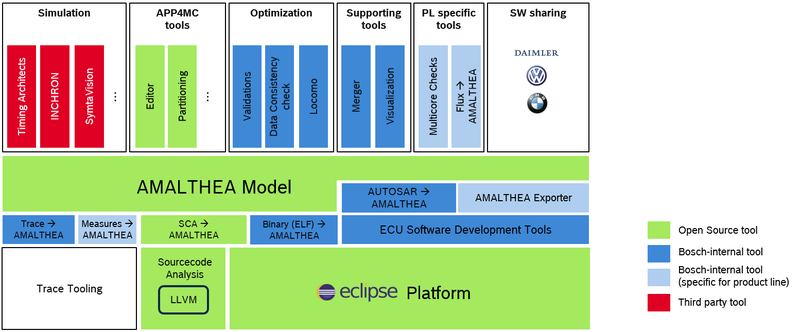
Abstract: The challenge consists in providing concepts for realizing implicit and LET communication, then assessing their impact on the end-to-end latency along a set of given cause-effect chains in a full blown engine management software using the Amalthea performance model.
The Bosch industrial challenge was proposed by Arne Hamann, Simon Kramer, Martin Lukasiewycz, Michael Pressler, Dakshina Dasari, Falk Wurst and Dirk Ziegenbein from Bosch GmbH. in WATERS 2016, then extended and evolved in WATERS 2017, and 2019.
Dassault – Middleware for Drone-Like Cyber-Physical Systems

Abstract: The challenge is based on a small drone-like cyber-physical system and consists in contributing the concepts, models, candidate technologies, and analyses of the proposed use case’s middleware layer. Contributions are expected on timing-contract languages, suitable abstractions of the concrete technological solutions, compositionality and genericity of the correctness arguments.
See the RESSAC use case, called “μXAV: A Collaborative Development Assurance Lab”, proposed by Emmanuel Ledinot from Dassault Aviation and presented in WATERS 2018 for detailed material and solutions submitted to date.
Thales – Aerial Video System to Detect and Track a Moving Object
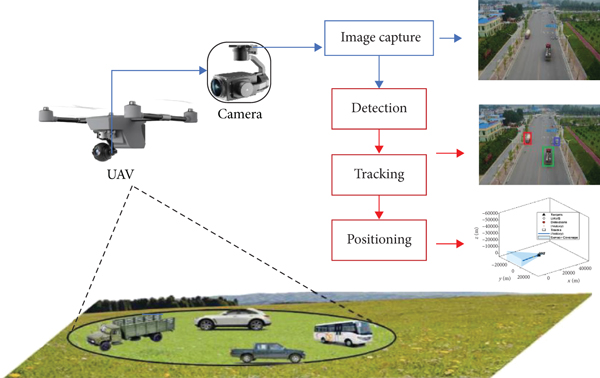
Abstract: The challenge involves a mission critical system used in intelligence, surveillance, reconnaissance, tactical and security applications that is characterized by strict and less strict constraints on timing. The application must
- Display a high quality video imagery to the user.
- Detect patches of the image that may be moving differently from the background by combining image registration and motion estimation.
- Track the corresponding object over longer time periods when such a patch persists for several frames.
- Follow the tracked object even when it is temporarily hidden from view (e.g. the vehicle proceeds in and out of several tree obstructed areas) through motion prediction.
See the Formal Methods for Timing Verification proposed by Rafik HENIA and Laurent RIOUX Thales Research & Tech